
0821
Transformation
Scale
scale by
Translate
Translate by
Rotate
Order matters
Rotate first, translate later ≠ Translate first, rotate later
Can group objects into hierarchies - objects make of sub-path
Visible object in Unity: Unity Objects
Create parent: make empty object, drag child under parent
Each object has its own transformatios.
Hierarchy window
1 | (world) |
Read transformation from botton to
top. (Scale
Scene View - edit object
Hierarchy - shows all game objects
Inspector - shows the components of objects:
Components
- transformation
- mesh filter
- mesh render
- collider
- script-code,C#
Project - items in the assets folder
Assets
- material
- Texture
- Meshes
Triangle
Grapic cards (GPU's) are made to draw triangles
Why?
Fit sized memory footprint. Alway planar.
vertex- vertices
Triangle/polygon face
Can buid complex shape with lots triangles.
Unity uese indexed face sets to storce meshes.
Indexed Face Set - list of vertices, list of face that reference
Tetrahedron
| Index | Vertices |
|---|---|
| 0 | (1,0,0) |
| 1 | (0,1,0) |
| 2 | (0,0,1) |
| 3 | (1,1,0) |
order vertices clockwise when viewed from outside
| Faces |
|---|
| 1,0,2 |
| 1,3,0 |
| 1,2,3 |
| 0,3,2 |
Create Mesh
1 | Mesh my_mesh = new Mesh() |
Make Vertex List
1 | Vector3[] verts = new Vector3[4]; // 4 for vertices number |
Vector3 - 3 floats
Make Faces
1 | int[] tris = new int[12]; // 3x number of triagle |
Diffuse Surfaces
not shiny (e.g. paper, matte print, chalk)
normal - unit vertex perpendicular to surface
brightness of surface prependicular to
if
0826
1 | my_mesh.RecaculateNormal(); |
For sharper look - do not smooth a mesh's adjacent normals by averaging them
Random Numbers - at the heart of PCG
let use credic variations in a scene
In graphics of games: use pseudo-random numbers
- not strictly random
- use predictable, sophisticated algorithms
- can generate random numbers in a predictiable way (random seed)
Use of random numbers
- select from distint options (e.g. brick vs. wood house)
- placement of objects (e.g. trees in forest or park)
- parameter
- height of dinosors
- color of fish(red, grenn, blue)
Assuem: random routine random() <- returns float in [0,1)
get integer between 0 and n-1
1 | rand_int = (int) floor(random()* n); |
Random number seed
let us repeat random sequences
- create sequences from one seed
- Minecraft + No Man's Sky
- Seed are usually integers
Random routine: seed(s); "s" is an integer seed
1 | seed(12); |
Ex.
1 | if (random()<0.3) |
1 | int pick = (int)floor(random()*4); // 0 to 3 |
Random color
1 | color c = new Color(random, random(), random(), 1.0f); |
Random point in square
1 | for (int i=0;i<20;i++){ |
Random point in circle : rejection sampling
- pick random point in square
- reject point if not in circle (
)
Random point on circle or sphere
- generate random point in circle
- project to surface of circle
1 | float len = sqrt(x*x+y*y); //assue circle center is (0,0) |
random() gives equal probability of any number
probablity density function
sometimes we want some values to be more likely:
1 | float r =random(); |
vehicles often require paths
- cars/streets
- trains/tracks
- wagon/dirt road
- gondola/canal
- hikers/trails
Streets of cars popular in games
- sim city
- City: Skyline
- Grand Theft Auto
- Large City Undercover
- Super Mario Kart
How to make strees
- real stress: OSM Open Street Map
- fictional cities: use PcG!
Two approaches:
- Grid-based(today & Thursday)
- free-form(later)
0828
Method2 Recursive Subdivision
- create binary (or grid) tree of region
- each reigon has min&max x,y ranges
Montains can be ragged(Rockies) or smooth(Appalachians)
What to make: height field
Height field: 2D array of height of each all the array
Can render this as a 3D polymon mesh (tirangle or suqare)
Note: cannote give caves or overheads
Create terrain height values?
Random numbers!(Noise)
Maintain can be rugged or smooth
We want to control the randomness
Noise: white, band limited, fractal(1/f), blue...
White noise
Every is random & independent of neighbors.
Ex: static image on an old TV
Band-Limited Noise
Controlled randomness
Some corellation between nearby values.
No coreletion between far apart locations.
1D value noise(smooth join of random values)
Not great:(too much low of frequencies) can have long stretches that are nearly the same in value
1D Perlin noise(band-limited)
Ken Perlin
Mkae function go up and down regularly
Use slope instead of values
Smooth: No overly large similar height
Actually do this in 2D or 3D
Want: repeatablity of values - same result that start them
Use: random number seeds
1 | float noise1d(float x){ |
2D * 3D noise is similar
interp in (x,y) or (x,y,z)
Perlin noise can give smooth hills. Rough mountain?
- high amplitude low fre = 1/wavelength
- Mid. amp. mid freq.
- low freq. high freq.
0902
Mazes
Many video games mazes
- central to game(PacMan)
- as mini-puzzles
- parts of dungeon creation
Early mazes had paths that were not branched (unicursal)
Junctions(branches) were added. Most basic form is simply connected
Can solve by putting hand on one wall.
Multiply-connected maze
(Islands)
hand-on wall will not always solve!
Start with many isolated cells. Then knock down walls.
Only knock out walls that connect separate region.
Tracking regions
Classic group algorithm problem
Early but slow:
Overwrite number in one cell with the other of the cell if is joined to.
Two approaches to randomly deleting walls
- Brute force: randomly pick a wall, see if it's not yet deleted(slow at end)
- create list of all walls, select from this, update list
Faster way to determine connected regions
union-find(disjoint sets)- data structure & algorithm
High-level description
- each region has one "root" cell
- All other cells in conncected region point(maybe indirectly) to root(→)
- Union(connect) two regions, cause one regions's root to make it point to the other region's root
- pointers along the way are updated to take shorter path to root
Each union operation is nearly constant time. (inverse Ackerman function)
Many variations possible
delete more edges than you need: islands
can use other cell shapes: e.g. hexagons
can arrange cells in circles
Dungeons in Games
- Role Playing Games(RPG)
- Adventure-style (puzzle)
- Hack& Slash(combat)
- Roughe-like
Key fatures of dungeon layouts
- multiple connected rooms or caverns
- all rooms reachable
- rooms can vary in szie or shape
- many include doors (exp. in puzzle games)
Major Theme: room connectivity
Many was to create dungeons.
Tile Based Approach to Dungeons
similar to maze creation
Usually square cells.
0 - Wall
1 - no wall
2 - door in wall
All small Roooms
Run maze creation algorithm, gives fully connected sets of cells.
Big to Small Rooms (0 - wall, 1 - no wall, 2 - door in wall)
- Randomly plaze large rooms in grid. Don't overlap rooms.
- Use a maze-generation algorithm on the remaining open space to create hallways that connect the rooms.
- Clean up the hallways and add details like doors and decorations to finalize the dungeon layout.
Big Room & Hallways
Place big room in grid, but not touching
Un-marked walls are hallways.
Knock-out doors: 0
Cellular Automata
Rules for changing grid cell states
Game of Life
09/04 — Streets (Free Form)
1. Overview
Free-form street generation aims to produce road networks that follow
natural urban evolution rather than a rigid grid pattern.
Procedural algorithms must balance connectivity,
realism, and terrain adaptation, while
allowing parameters to control style (organic, radial, grid-like).
Traditional grid methods fail to capture historical or topographic influences; free-form methods simulate how streets grow under local and global constraints.
2. Street Generation Models
2.1 Agent-Based Growth Models
Each active street endpoint is treated as an agent with local
rules.
At each time step, an agent can extend,
branch, or terminate based on
environmental cues.
Typical local rules:
- Continue forward unless a collision or boundary is reached.
- Branch with probability
.
- Avoid collisions by steering around nearby segments.
- Stop if within threshold distance
from existing roads.
Pseudocode
1 | for agent in active_agents: |
This approach produces organic, branching patterns that resemble historical street layouts.
2.2 Tensor Field Method
Introduced by Parish and Müller (2001), this approach defines a tensor field over the terrain to represent desired street orientations.
A tensor field
The dominant eigenvector of
Street agents integrate along the field:
This ensures global directional coherence (e.g., radial from city center or aligned to terrain slope).
Tensor fields are often generated by blending:
2.3 Potential Field Approach
A scalar potential field
- Low potential → desirable (downtown core)
- High potential → undesirable (rivers, obstacles)
Agents follow the gradient descent:
The potential is often constructed as a weighted sum of population
density and obstacle penalties:
2.4 Combined Multi-Field Model
Modern systems combine both tensor and potential influences:
3. Connectivity Control
To prevent disconnected fragments, intersection detection and merging are performed:
- Intersection test: if distance between endpoints < threshold, merge.
- Angular snapping: adjust orientation to align to
nearest road within
. - Hierarchical merging: major roads first, local roads later.
4. Parameter Control
| Parameter | Meaning | Typical Range |
|---|---|---|
| branching probability | 0.05–0.25 | |
| min intersection distance | 2–10 m | |
| branch angle | 15–45° | |
| tensor vs potential weights | 0.3–0.7 | |
| step | agent growth step size | 1–10 m |
5. Evaluation Criteria
- Connectivity: single connected network.
- Coverage: proportion of domain covered by
roads.
- Curvature smoothness: low average angular
change.
- Adaptation: roads follow elevation contours and
avoid obstacles.
- Hierarchy: differentiation between major and minor roads.
6. Exam Focus
- Explain how tensor and potential fields guide road growth.
- Compare agent-based, tensor field, and potential field models.
- Derive how
defines local orientation.
- Describe how merging and snapping ensure connectivity.
- Discuss trade-offs between local stochasticity and global coherence.
0909
Erosion
Natural terrain creation:
- landmass creation(uplift)
- erosion
New landmass creation:
- Volcanism(e.g. Hawaii)
- motion of tectonic plates (Appalachia)
Erosion
- Termal(material knocked loose, piles up below)
- wind
- Glacier
- Hydronic
"The Synthesis and Rendering of Eroded Fractal Terrains"
- Siggraph 1989
Hydraulic erosion simulation steps
- create fractal height field (e.g. Perlin noise) on aa square grid
- deposit water at random locations(rain)
- waterflow downhill
- fast moving water picks up sediment
- slow water deposit sediment
Each vertex has info:
- altitude of terrain (
) - water amount (
) - sediment in swater (
)
Each vertex may move water to four neighbors
Consider vertex v and geighboring verrtex u:
Amount of water paasted from v to u
t = current time
t+1 = next time step
K_d = how fast sediment can be deposited
K_c = how much sediment water can carry
K_s = how easy is it for water to pickup soil(soil surface)
Repeatedly move water of soil over time steps t, t+1, t+2, ...
Result
- Water carves channel in terrain
- sediment picked up an steep slope(up high)
- sediment deposited in flat areas(blow)
Snowball Algorithm (Job Talle)
move vertex along one path at at a time
- place random ball on terrain
- it rolls downhill
- picks up sediment if moving fast
- deposits sediment if slow
- repeat this many times
Random Distribution
PDF (Pobability Density Function)
1 | r = random(); |
Ken Perlin calls this bias.
Christoph Schlick's version
bias(r, .25) opposite to Bias(r, .75)
bias(r, .5) same to random()
Can also control contract. (Pushed values towards or away from .5)
Called gain.
Gain function in 2 bias curves stifched together
r2 = (random()+random())/2.0;
Produce this PDF: peak at 0.5, triangle
R3 = (random()+random()+random())/3.0
Approach the Normal Distribution
Central Limit Theorem
Conbine several distribution
1 | wsum = w1+ w2 + w3 |
Ex. w1 = .8 w2= .2 w3 =0
09/11 — Building Facades
1. Overview
Facade generation defines the surface layout of architectural
elements — windows, doors, balconies — after the building mass has been
determined.
It is a hierarchical, grammar-based process that ensures style coherence
and realism.
2. Hierarchical Decomposition
A facade is decomposed recursively into smaller structural units:
Each level applies split rules along horizontal or vertical axes.
Example:
1 | split(Y) { 0.1:Base | 0.8:MiddleFloors | 0.1:Roof } |
This yields a consistent floor and window arrangement.
3. Grammar Structure
3.1 Split Rules
Divide a shape along an axis:
3.2 Repeat Rules
Repeat elements across the facade with spacing control:
1 | repeat(X, step=windowWidth){ Window | Column } |
3.3 Attribute Matching
Each shape carries attributes
When selecting rules, matching ensures coherence between neighboring
regions (e.g., same window size across one floor).
4. Parametric Facade Control
4.1 Geometric Parameters
- Floor height
- Window aspect ratio
- Wall-to-window ratio
- Balustrade height
These control realism and are sampled from architectural distributions.
4.2 Style Attributes
Materials, frame styles, and ornamentation are chosen
probabilistically within style clusters:
5. Coherence and Symmetry
5.1 Vertical Coherence
Ensure balconies and window columns align vertically:
5.2 Horizontal Coherence
Ensure repetition of window style within each floor:
Symmetry constraints are commonly applied:
- Mirroring left/right facade halves.
- Pattern repetition every
floors.
6. Detail Level and LOD
Facades can be represented with progressive detail:
- Texture-based representation: distant view.
- Procedural geometry: mid-range.
- Full 3D components: close-up, for window frames and ornamentation.
Transition rules maintain consistency across LODs.
7. Pseudocode Example
1 | def derive_facade(shape): |
8. Randomness and Style Control
Procedural variation is introduced through stochastic rule selection while maintaining constraints.
Controlled randomness:
9. Exam Focus
- Write a hierarchical grammar for a three-floor facade.
- Derive and explain attribute matching.
- Describe vertical and horizontal coherence constraints.
- Compare deterministic vs stochastic rule application.
- Explain multi-level LOD representation for facades.
09/16 — Building Shapes
1. Overview
Building shape generation defines the 3D volumetric
structure of architecture before facade detailing.
The goal is to create plausible, style-consistent building masses that
fit within urban and functional constraints.
This process extends from the principles of shape
grammars and procedural modeling introduced by
Müller et al. (2006, Instant Architecture).
2. Procedural Building Modeling
2.1 Shape Grammar Framework
A shape grammar defines rewriting rules that
transform abstract shapes into more detailed geometry.
A rule has the form:
Each building starts from a lot footprint and expands vertically using extrusion and subdivision rules.
Example
1 | Building → Extrude(height=h) → Mass |
3. Core Geometric Operations
| Operation | Symbol | Description |
|---|---|---|
extrude(h) |
⬆️ | Raises a 2D footprint into 3D volume. |
split(axis) |
Divides a shape along an axis into parts. | |
repeat(axis, step) |
Repeats a shape periodically. | |
taper(angle) |
Applies linear scale gradient along height. | |
roof(shape) |
Replaces top with a parametric roof (flat, gable, dome). |
Operators can be deterministic (fixed size) or stochastic (sampled parameters).
4. Control Attributes
Procedural building models use attributes to control style and constraints:
| Attribute | Symbol | Example |
|---|---|---|
| Height | sampled from normal distribution |
|
| Aspect ratio | defines building footprint proportion | |
| Style | affects roof type and ornamentation | |
| Symmetry | Boolean controlling mirrored parts |
5. Roof and Volume Modeling
5.1 Roof Parametrization
Common roof types are defined by parameter sets
| Roof Type | Equation |
|---|---|
| Flat | |
| Gable | |
| Hip | |
| Dome |
5.2 Aggregated Structures
Complex buildings are created via CSG (Constructive Solid Geometry)
union of sub-volumes:
Hierarchical merging ensures topological consistency and stylistic
coherence.
6. Shape Grammars and Instancing
Each rule produces geometry instances. Random seed and style weights define variation.
Example instancing rule:
1 | split(X){ 0.4:Tower | 0.6:Wing } |
This probabilistically generates towers or wings with different proportions.
7. Semantic Constraints
Procedural generation respects functional and physical constraints:
- Lot coverage:
- Height limit:
- Sunlight constraint: maintain minimal setback to prevent shadow occlusion.
Violations are penalized via energy function:
8. Example: Pseudocode Implementation
1 | def generate_building(lot, params): |
9. Exam Focus
- Write a shape grammar that produces a 3D building mass with variable
roof type.
- Explain difference between deterministic and stochastic
subdivision.
- Describe the role of attributes (height, style, symmetry).
- Explain how energy constraints maintain realism.
- Derive formula for gable/hip roof geometry.
09/18 — Tree Geometry
1. Overview
Procedural tree modeling captures the hierarchical branching
structure of natural trees.
It combines biological rules (botanical structure) and
algorithmic models (L-systems, self-organizing tree
models).
2. Botanical Framework
2.1 Modular Units
Each tree is built from phytomers, repeated growth modules consisting of:
- Internode (stem segment)
- Leaf
- Axillary bud (potential branch)
A branch can be recursively defined as:
2.2 Axis Hierarchy
Tree axes are categorized by order:
| Order | Description |
|---|---|
| 0 | Trunk |
| 1 | Primary branches |
| 2 | Secondary branches |
| n | Higher-order twigs |
Branch order determines scaling factors for length and radius.
3. Geometric Relations
3.1 Allometric Scaling
Empirical relationships govern branch geometry:
3.2 Leonardo’s Rule
The sum of cross-sectional areas of daughter branches equals that of
the parent:
4. L-System Models
A Lindenmayer system (L-system) defines string rewriting rules to model growth.
Example Grammar
1 | Axiom: F |
Interpretation:
F= draw forward+/-= yaw rotation[/]= push/pop turtle state (branching)
This recursive expansion produces a fractal-like branching tree.
5. Self-Organizing Tree Models (SOTM)
Introduced by Runions et al. (2007), these models simulate growth influenced by attraction points (light or nutrients).
Algorithm outline:
- Scatter attraction points in space.
- For each branch tip, find nearest attraction points.
- Grow toward their centroid.
- Remove points within influence radius
.
- Repeat until convergence.
Mathematically, new direction:
This produces natural, phototropically distributed branching.
6. Parameter Control
| Parameter | Effect | Range |
|---|---|---|
| Branching angle |
controls openness | 20–60° |
| Tropism vector |
global bias (e.g., toward light) | normalized |
| Decay factor |
growth energy reduction per level | 0.7–0.95 |
| Influence radius |
determines pruning density | 0.2–1.0 m |
7. Integration with Rendering
Tree geometry is converted into renderable meshes using cylinder or
generalized cone primitives.
For efficiency:
- LODs use billboards for distant trees.
- Mid-range uses instanced geometry.
- Close-up models include leaf clusters and surface textures.
Leaf distribution uses stochastic sampling along branches:
8. Pseudocode Example
1 | for iteration in range(max_iters): |
9. Exam Focus
- Explain difference between L-system and self-organizing tree
models.
- Derive Leonardo’s rule and its implication for radius scaling.
- Describe how attraction-based growth approximates
phototropism.
- Write pseudocode for recursive branching generation.
- Discuss trade-offs between biological realism and computational cost.
0923
Parametric Curves
convex hull: is smallest polygon that contains a given set of points
Weighted sum of points
If weights sum to 1 and are
non-negative, then Q is inside the convex hall of n
points
Q is a convex combination of points in P.
Line Segment
Basic Formular for Line Segment
Cubic Bezier Curves
4 control points: P1, P2, P3, P4
curve passes thru P1+P4 not P2,P3
direction at P1+P4 are given by P_2,P_3
curve is inside convex hull of P1,P2,P3,P4
Points on Bezier curve given by
1 | float B2(float){ |
Catmull-Rom Splines
Create curve that goes thru all control points
Parametric Surfaces
Cylinder
Sphere
09/25 — B‑Splines and Bézier Patches
1. Overview
Surface modeling in procedural content generation often requires
smooth, continuous, and compact representations.
Bézier patches and B‑Splines provide
parametric surface definitions ideal for terrain, character, and
architecture modeling.
A parametric surface maps
2. Bézier Patches
2.1 Definition
A bicubic Bézier patch is defined by a
2.2 Properties
- Affine invariance: transforms apply directly to
control points.
- Convex hull property: surface lies within convex
hull of
.
- Endpoint interpolation:
, .
- Continuity:
, , or continuity between adjacent patches is achieved by sharing or constraining control points.
3. Bézier Patch Continuity
Let
continuity:
continuity:
Ensuring
4. Tensor‑Product Construction
Bézier patches are tensor products of 1D curves:
5. B‑Spline Surfaces
5.1 Definition
A B‑Spline surface generalizes Bézier patches by using
piecewise polynomial basis functions with a knot
vector.
5.2 Local Control
Unlike Bézier patches, B‑Splines affect the surface locally;
modifying one control point influences only nearby regions.
Continuity depends on knot multiplicity:
| Knot multiplicity |
Continuity | Example |
|---|---|---|
| 1 | cubic → |
|
| 2 | cubic → |
|
| discontinuous | separate pieces |
6. NURBS (Non‑Uniform Rational B‑Splines)
NURBS add rational weighting for representing exact circles and
conics:
7. Rendering and Tessellation
Procedural pipelines subdivide patches into triangles by evaluating
Adaptive tessellation density is based on curvature:
8. Exam Focus
- Derive Bézier patch equation from Bernstein polynomials.
- State
/ continuity conditions.
- Explain difference between Bézier and B‑Spline local control.
- Derive recursive form of B‑Spline basis.
- Define how NURBS generalize B‑Splines.
0930
Subdivision Surfaces
Bezier Patch Issues
- continuity between patches is complex
- must divide surface into good patches
Alternative: Subdivision Surfaces
- turns any polygen mesh into smooth surface
- triangles, quads, pentagons, etc.
- continuity comes "for free"
- simple to pro=gram
Loop Schema
C^2 continuous nearly everywhere(triangles)
Subdivision
- compute locations of new vertices for edges
- move positions of old vertices, too
- make smaller tirangles
Move old vertices
Most common valence is 6
All others are called "extraordinary" vertices.
Catmull-Clark (Mostly quads)
C^2 continous nearly everywhere
- only quads after 1st subdivision
- all valence 4 for new vertices
New vertices for face
v: centroid of the surrounding vertices
K-gon
Vertex for edge
More old vertices(valence k)
Most vertices will be valence 4
New valence 4 vertices are where surface is only C^1 continous
Can "tag" edges to be sharp
sharp edge vertex:
Old vertex with 2 sharp edges
Semi-Sharp Edges
Use sharp rules s times, then use smooth rule all other times
Ex.
1 | if surface == 1 |
1 | light = [1 0 0] |
Typical 2D texture mapping
Solid Texture
1002
World Texture(Solid)
1 | y=point[2] |
Spotted donut
1 | color = white *noise(point) |
Bumpy Donut (bump mapping)
1 | normal+=Dnoise(point) |
Dnoise: gradient of noise
Dlown Denut
1 | color = Colorful(Noise(k*point)) |
1 | function marble(point) |
Fast Texture Synthesis using Tree-structured Vector Quantization (Wei & Levoy) Siggraph 2000
Give: sample texture (an image)
Create: lots more texture (bigger image)
Slow Synthesis
Intialize target with random poxels from source
For each pixel(x,y) in target
build neighborhood
for each pixel
build neighborhood N_s
if (dist(N_s,N_t)<D_{best})
D_{best}=dist(N_s,N_t) C_{best} = color_source(x',y')
endif
endfor
color_target=C_{best}
Endfor
Dist(N_s,N_t) = sum of squared difference of r,g,b
Causal vs. Non-causal
Image pyramid
using image pyramid:
give use effect of high-res neighborhoods of lower cast
copy random pixels to targe pyramid at level k
perfor 1-level synthesis at k
for k-1 down to 0
perform synthesis with 2-level of pyramid
10/09 — Implicit Surfaces
1. Overview
Implicit surfaces are defined not by explicit mesh geometry, but as
the set of points satisfying a scalar equation:
2. Function Representation
2.1 Signed Distance Function (SDF)
Each point has a signed value indicating distance to the surface:
2.2 Metaballs and Blobby Models
Surfaces are formed by field superposition of primitives:
This produces smooth, organic blends (used in molecular and fluid
visualization).
3. Marching Cubes Algorithm
3.1 Concept
Given a scalar field
Algorithm steps:
- Divide domain into voxels (cubes).
- Evaluate
at cube corners.
- Determine cube configuration (binary pattern of signs).
- Use precomputed lookup table (256 cases) to triangulate cube.
- Interpolate edge vertices where
changes sign.
Edge interpolation:
3.2 Ambiguity and Topology
Ambiguous cases can produce holes or disconnected surfaces.
Dual methods (e.g., Dual Contouring) resolve this by
positioning vertices per cell via a QEF
minimization.
4. Dual Contouring (Ju et al., 2002)
4.1 Overview
Instead of one vertex per intersection, Dual Contouring computes one vertex per cell minimizing error to all intersecting surfaces.
For all edges
4.2 Feature Preservation
Unlike Marching Cubes, Dual Contouring stores normal vectors from
gradients of
5. Polygonization Workflow
1 | for cube in grid: |
Both Marching Cubes and Dual Contouring are applied to implicit terrain or volumetric noise fields such as 3D Perlin noise.
6. Procedural Terrain via Implicit Functions
Implicit fields can represent terrain using elevation + feature
blending:
7. Rendering Implicit Surfaces
7.1 Ray Marching
Iteratively advance along ray direction until
Step size proportional to current SDF value ensures convergence.
7.2 Normals
Surface normal computed as gradient of field:
8. Comparison Summary
| Method | Representation | Pros | Cons |
|---|---|---|---|
| Marching Cubes | Grid samples | Fast, easy | Topology ambiguity |
| Dual Contouring | Cell + gradient | Feature‑preserving | More complex |
| Ray Marching | Analytic SDF | High quality | Expensive per‑pixel |
9. Exam Focus
- Define implicit surface and SDF.
- Derive interpolation for Marching Cubes edge intersection.
- Write QEF minimization formula for Dual Contouring.
- Compare MC vs DC feature handling.
- Describe ray‑marching procedure and normal computation.
1016
Texture Synthesis 3 (Worley Noise)
Feature Points Distribution (How random points are scattered)
Worley noise is based on scattering random feature points throughout 3D space. For any point x, define:
- F1(x) = distance to the closest feature point
- F2(x) = distance to 2nd closest
- Fn(x) = distance to n-th closest
These values create cellular patterns (Voronoi-like).
1. Space Partitioning
Divide all 3D space into unit cubes (integer grid):
Each cube is indexed by:
1 | (i, j, k) = (floor(x), floor(y), floor(z)) |
This lets us uniquely identify a cell without storing anything.
2. Number of Points per Cell
Use a Poisson distribution to determine how many feature points a cell contains.
For density λ (paper uses ~4):
- Limit number of points per cell to 1–9 for efficiency (avoids too many empty cells → fewer neighbor checks)
3. Cell-Based Randomness
Each cell must always generate the same random points. Use a hash of the integer cell coordinates:
1 | seed = hash(i, j, k) |
This gives:
- reproducible random points
- infinite tiling
- no need to pre-store anything
4. Generating Feature Points Inside the Cell
For each feature point:
1 | fx = random() in [0,1) |
Actual position:
1 | pos = (i + fx, j + fy, k + fz) |
Points are uniformly scattered inside the cube.
5. Only Check a Few Cells
To compute F1 / F2 / Fn(x):
- Start with the cube containing x
- Check neighboring cubes
- Use the current best distance to prune far cubes
Typically only 1–3 cells need to be evaluated.
This makes Worley noise very fast (similar cost to Perlin noise).
6. Summary
Random feature points are generated on demand, using:
- Integer grid cells
- Poisson-distributed point counts
- Hash → per-cell RNG
- Points inside cell uniformly random in
- Neighbor pruning for fast closest-point search
1021
Spore Creature Bodies and Dual Contouring
Spore Creature Bodies
Goal
Automatically generate smooth, organic, editable creature bodies based on simple user input (adding limbs, scaling bones, dragging handles).
User edits → procedural shape generation → animation-ready mesh.
Implicit Surfaces
Creature body is defined using an implicit scalar field:
Each body part contributes a field:
Why implicit surfaces?
- Body parts merge smoothly and automatically
- No mesh stitching or topology management needed
- Works with arbitrary user edits
- Good for organic shapes (torso, limbs, joints)
Metaballs / Soft Blending
Each limb or body segment = a metaball (or soft primitive).
Field falls off with distance:
- Close → high influence
- Far → low influence
When two metaballs overlap:
→ fields add → shapes blend smoothly (no seams)
Used for:
- torso
- neck
- legs / arms
- tail
- smooth joints
Skeleton-Driven Shapes
User edits a skeleton, not the mesh.
For each bone:
- Position & length determine the center of a metaball
- Scaling adjusts radius
- Adding bones adds new implicit parts
Final geometry is generated after the skeleton is configured.
Dual Contouring
Used to extract a high-quality polygon mesh from the implicit surface.
Why not Marching Cubes?
Marching Cubes:
- smooths out sharp edges
- cannot preserve creases
- ambiguous cases → holes
- vertices stuck on edges → low flexibility
- not ideal for stylized creatures (claws, mouths, shells)
Spore needs both:
- smooth organic areas
- sharp features (beaks, claws, armor)
→ Dual Contouring solves these.
Dual Contouring Overview
Unlike Marching Cubes (MC), Dual Contouring (DC):
- places one vertex per voxel cell
- vertex position computed by QEF
- preserves sharp features from surface normals
Steps:
1. Sample implicit field
For each voxel edge:
- If sign changes → surface intersects edge
- Store intersection point + normal (Hermite data)
2. Build QEF (Quadratic Error Function)
Given intersection points
- If normals agree → smooth region
- If normals disagree → sharp corner kept
This is how DC preserves creases.
3. Connect vertices (dual graph)
One vertex per cell → connect to neighbors → polygons.
Produces:
- clean mesh
- sharp edges when needed
- stable topology
Why DC + Implicit Surfaces Work Well for Spore
- Players can arbitrarily modify skeleton
- Body automatically reshapes
- All parts blend organically
- DC outputs a mesh suitable for animation
- Sharp anatomical features are preserved
- High quality with no manual modeling
Pipeline:
- User edits skeleton
- Generate implicit field (metaballs)
- Extract mesh via Dual Contouring
- Auto-skin to skeleton
- Animate
Summary
- Spore uses implicit surfaces (blended metaballs) to create organic body shapes.
- Mesh is extracted using Dual Contouring, not Marching Cubes.
- DC preserves sharp features using QEF.
- Entire creature body is generated procedurally from a simple skeleton.
1023
Fowler's algorithm
- describe base for pattern as surface of revolution
- space new bud at 137.5° from previous bud
- avoid overlap(colllison) by moving bud vertically
Base("receptial")
Each point
Position of buds
First bud:
Next angel:
Next t(and that h) is based on if there is a collision
Next
stop when
Probability Review
probability of event(p):
ex: chance taht pokeball catch pokemon
chance treasure chest has gold
probability of an event not happening: 1-p
prob. of two independent event A and B:
Prob of A or B (independent event)
Ex. Say we have
Not after one move:
Not after 2 move:
...
Not after 15 move:
~20% of player will not get reward after 15 times
Loot or item drop:
1 | float p =random(); |
Problem: can have long runs of bad luck
One fix: track(count) to last big reward
Random Shaffle
given: list of items
produce: shuffled list with items in new order
| original list | shuffled list |
|---|---|
| [0 1 2 3] | [] |
| [0 1 3] | [2] |
| [0 1] | [3 2] |
| [1] | [0 3 2] |
| [] | [1 0 3 2] |
Use 1 list
As original shrinks, use freed-up spot.(swaps) combined int
Alg. for shuffle
1 | int[] my_list |
Can shuffle events
Like recievng big, medium, small reward
How are pseudo random number selected?
Number Theory
Linear Congruential Generator (LCG) Okay matter for random
break up linear function use module (offer with %)
Integer parameter: a,c,m
Intial seed:
Next number:
Full "state" is just
Usually random number libraries will let you save their state
Usually uses xor128
Mersenne Twister
very good random algorithm.
Based on mersenne primes of form
Fast and high quality. More complex than LCG
Static is large: 2.5KB
1028
"Surface Simplification Using Quadric Error Measures" Garland & Heckbat, Siggraph 1997
Edge Centre effox -triangle mesh
before contraction
remove one vertex
after contraction
Where to put v? Maybe (v1+v2)/2. No cause is shrinking!
Implicit Line Equation
A point
Measure quality of new vertex position V?
Measure square distance to planes of adjecent triangles.
(3D) Implicit plane equation
For vertex
Can sum these quadric error metrics → represent a set of planes
One matrix is all we used for any number of nearby planes
Pick best v position to give lowest E(v)
A single quadric for one plane gives errors like this:
Two summed quadrics
Quadric error in 3D gives error ellipsoids
Min error at ellipsoid center
- create quadric metric for each possible edge collapse
- find best new position v for collapsed vertices of edge
- measure propost error for v's, rank them in priority queue
- perform edge collapse (repeatedly) from laner-error edges in queue
- stop when mesh has target # trigles
Game Performance Optimization
Smooth feeling of game depends on frame rate
Frame rate is number of images drawn per second
High frame rate -> smooth feel
Low -> feels laggy
Frame rates measure in Hextz(Hz) or fps(frames per second)
High quality: 60 Hz or above
30Hz is okay standard video rate
Below 30 Hz becomes noticeable
Bottleline
Profiler
Tool that records what part(s) of code are most visited
Unity has profiler! Not all code development system do :(
Start in unity: Window-> Analysis-> Profiler
[Select Deep profiler]
Object Pooling
object often created or destroyed: bullets, trees, coins, enemies, perticks
Creation or Destraction Issues
- create or destory may slow game(time in unity)
- memory fragmentation
- can cause frequent garbage collection
Soltion: don't create or destory objects
Re-use old objects
Create pool (list) of object (e.g. coins)
1030
Transparent
Opacity(
pixel color =
draw background objects first
then draw translucent biliboard
Keyframe Animation
Many aspects of objects can be animated:
size, position,orientiation,color transparenting, etc
Animation exampls:
bunning ball
ghost fading enemy(becomes transparent)
Chennel
single numeric value of object that can changeover time
Ex. y-coordinate
rotation around z-axis
red color of object
Consider bouncing ball
Start here
move to here
return to here
start with
at frame 0 change to
at frame 30 (one second) return to
at frame 60 (two seconds)
frame: key frames
t_y: channel
keyframe: frames of which channel is sspecified directly
channel values between key fraems: interpeolation
Can interlolate in various ways
- Catmull-Rom (above), Bezier
Creatures & Humans use articulated models
We don't directly move the body
We use invisible joints and bones
joint: position & oriention
Bones: few connected joints(length is fixed)
Skeleton(rig): joints&bones
one joint is root, with specified postion & orientation
all other bones&joints specified indirectly based on joint orientation
Have mesh surrounding the rig
Mesh connected to rig by skinning
mesh(only see this)
"Bind pose" often T-pose
Each bone has local coordinate system
A,B,C vectors
Skinning: mesh points associated with 1 or more bones
P1: w1=1, w2=0
P2: w1=.75, w2=.25
P3: w1=.5, w2=.5
p4: w1=0, w2=1
weights sum to 1
Each vertex v is represented in bone's local coordinate system at bind time
A,B,C: bone info
a,b,c: v's info
New vertex is weights some of position relative in each bone:
1104
Spare Animation
Character‘s carry out many movements
reach far fruit
pound ground
clap
point
backflip
dance
Real-time Motion Retargeting to Highly Varied User-Created Morphologies
Anitmators use forms inverse kineatics to make motions
1. select body part
Animator wants creature to reach fro fruit with hand
Body parts have capabilities
graspses(hand) spine
foot root
Mouth
Animator specific capability of part they want to move.
Ex. grapseer might result in 2 or 4 parts
Animator narrors the list with spatial queries.
Queries: front/center/back
left/center/right
top/center/bottom
top left grasper(relative to whole body) top left grasper(relative to all graspers)
Can also specify most distant part in a direction
ForeMost, BackMost, RightMost, etc
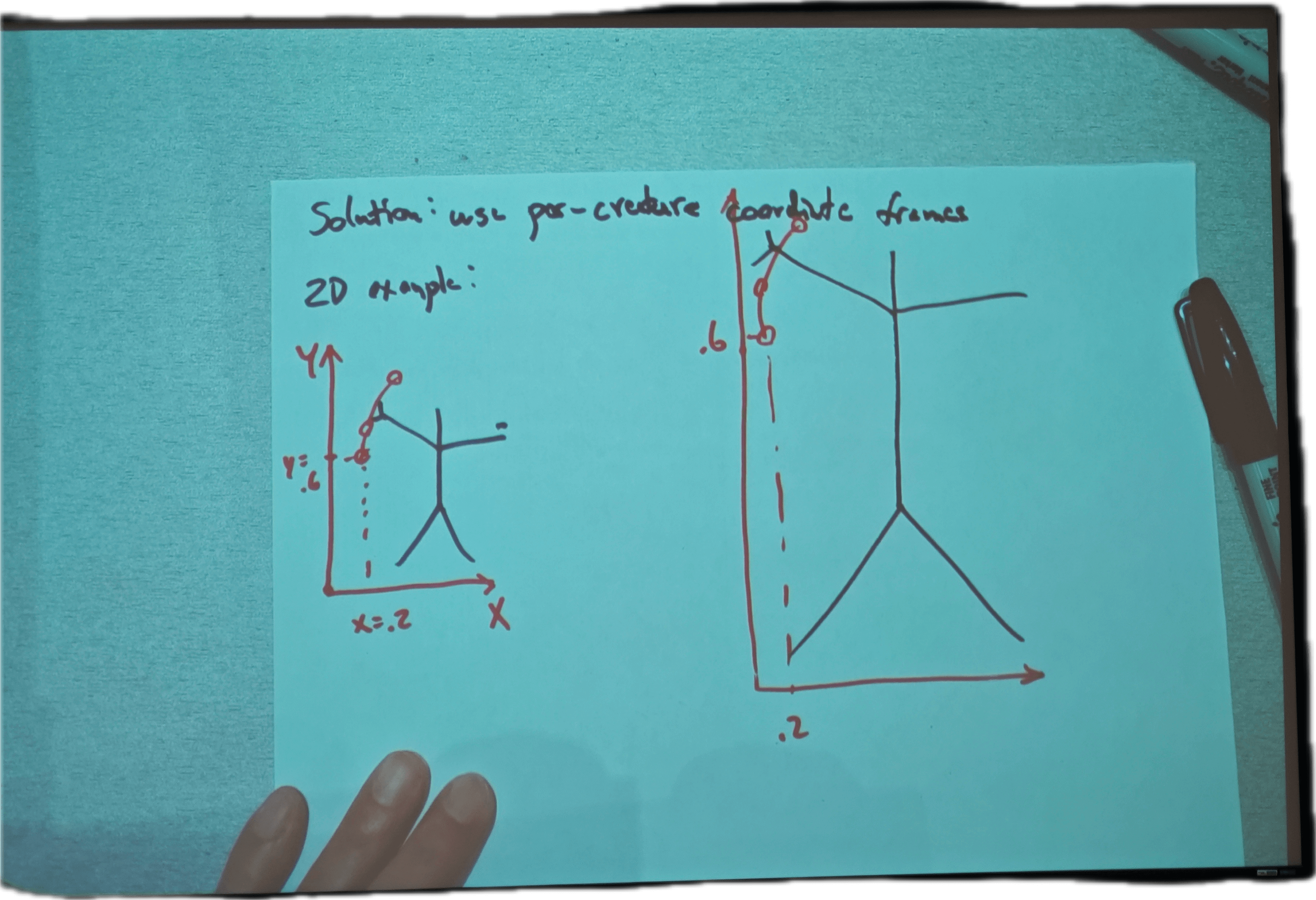
2. Moving Body Parts
Usually pose ends of limbs(IK) and rest of body follows.
Body parts locations are not in absolute coordinates.
Solution: use per-creature coordinate frames
2D example:
Coordinate frame from ground to grasper
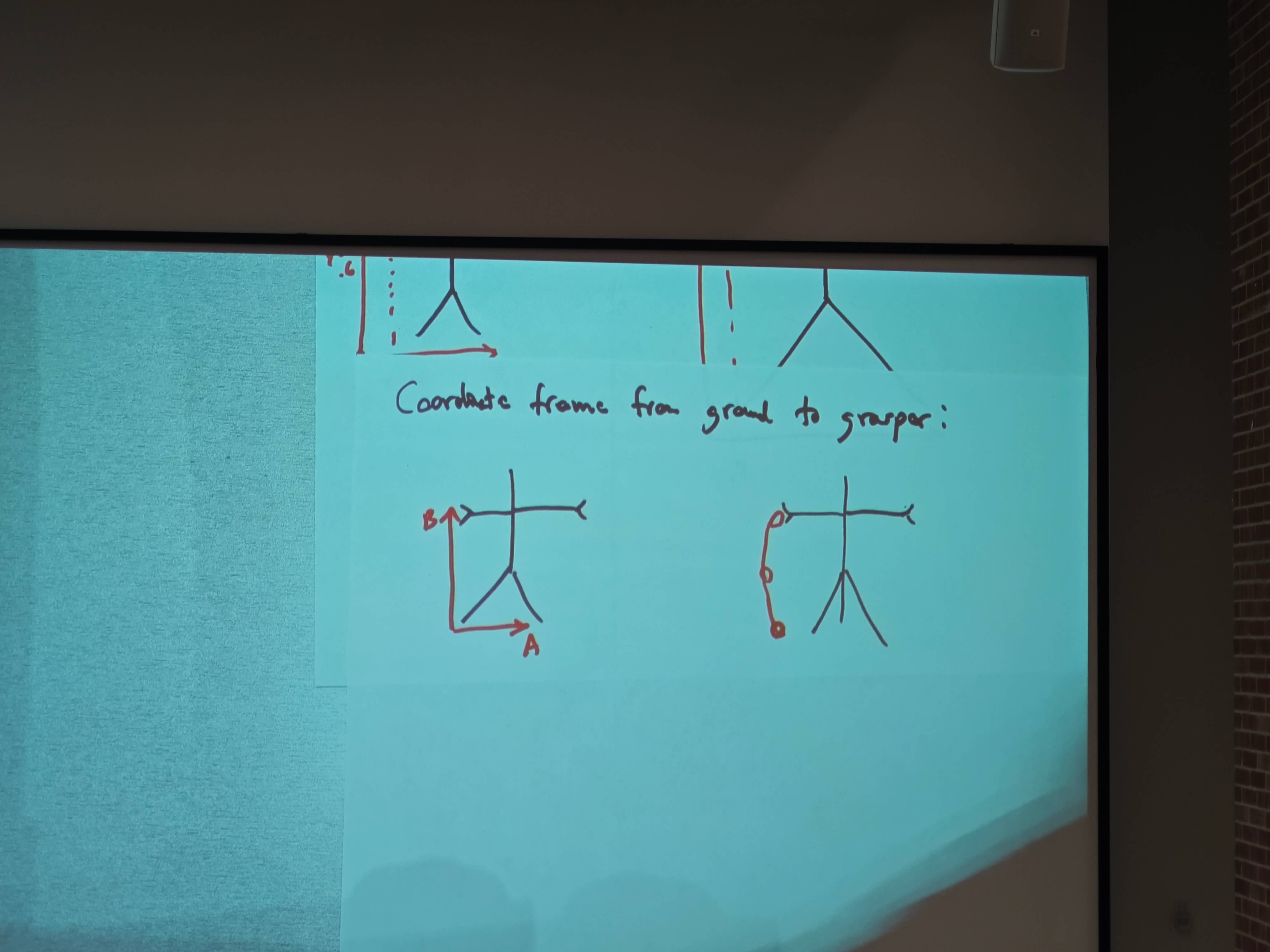
(pick up item from ground)
Align frame with object
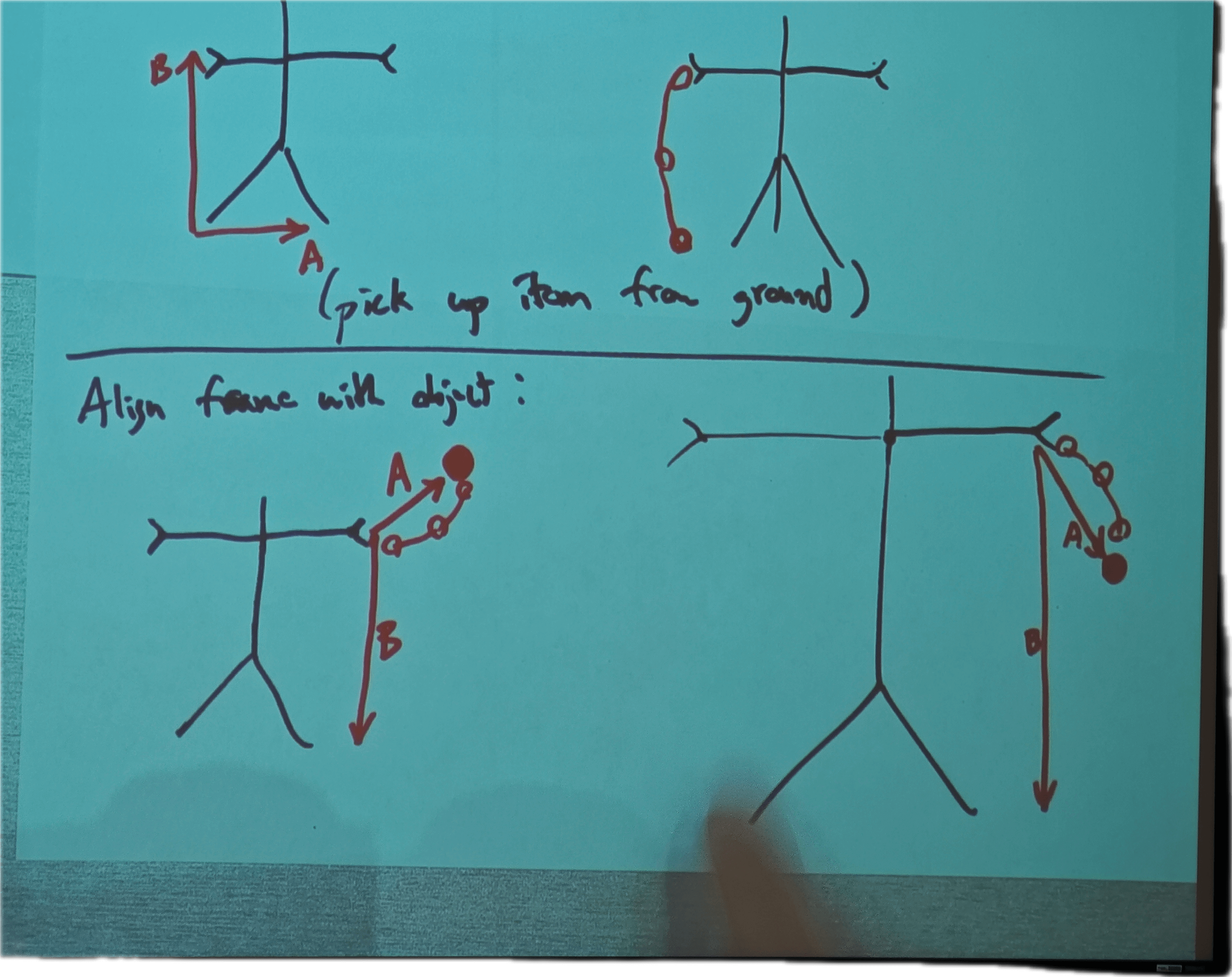
Align frame with mouth(for eating)
Particle System
Represent geometry as set of 3D points
+: (x,y,z), color, opacity, orientation, velocity, accelation
-: no connectivity, no surfaces,
Phenomena: smoke, water, fire, explosion, trees, grass, snow
Birth
randomly create particles
- in a shape (box, sphere)
- on a shape (sphere, mesh)
density of particles may be based on surface area or screen-space area
Intial Velocities: zero, outward from object, pseudo-random
1106
Particle State
Mass(m)
P=(Px,Py,Pz) position
V=(Vx,Vy,Vz) velosity
Many particles in a big list
Move them time in equal steps(
Simulation loop
1 | For each timestamp |
Posible froces
- gravity
- wind
- damping
- attraction to near particle
- repulsion from other particle
- spring attach to other particle (mass/spring simulation)
f: force
a: acceleration
New position: p'
Animal groups
Flocks, herds and schools: A distributed behavioral model
-Craig Reynolds, Siggraph 1987
- flocks of birds
- schools of fish
- herds of wildebeests
Why fish?
defense against preditors
effective search for food
social & mating activity
efficient locomotion(drafting)
How to Animate?
keyframe each Ash? no!
simulate(roughly what animals do: observe & react)
Flight Model of Boid
has postion & velocity (6 degrees of freedom) DOF
min/max velocity
Flocking Behavior("forces")
- Collision avoidance(with other boids, with obstacles)
- velocity matching (near boids have similar velocityes)
- flock centering - stay close to local center of flock mates
- wander - small random divisition changes
1,2,3 - require knowing nearby boids
naive:
Behavior combining
Weighted averge of forces - sometimes leads to indecision
Better: prioritize some behaviors
behavior #1 makes a request
lefove acceleration
Simulate Peception
- vision
- hearing
- lateral line (fish: pressure)
Avoid Obstacle
Steer-to-avoid
- intersect forward ray with world
- Find silhouette point closet to the heading
- aim one body length away from silhouette
Each boid is affected by closet boids (in neighborhood)
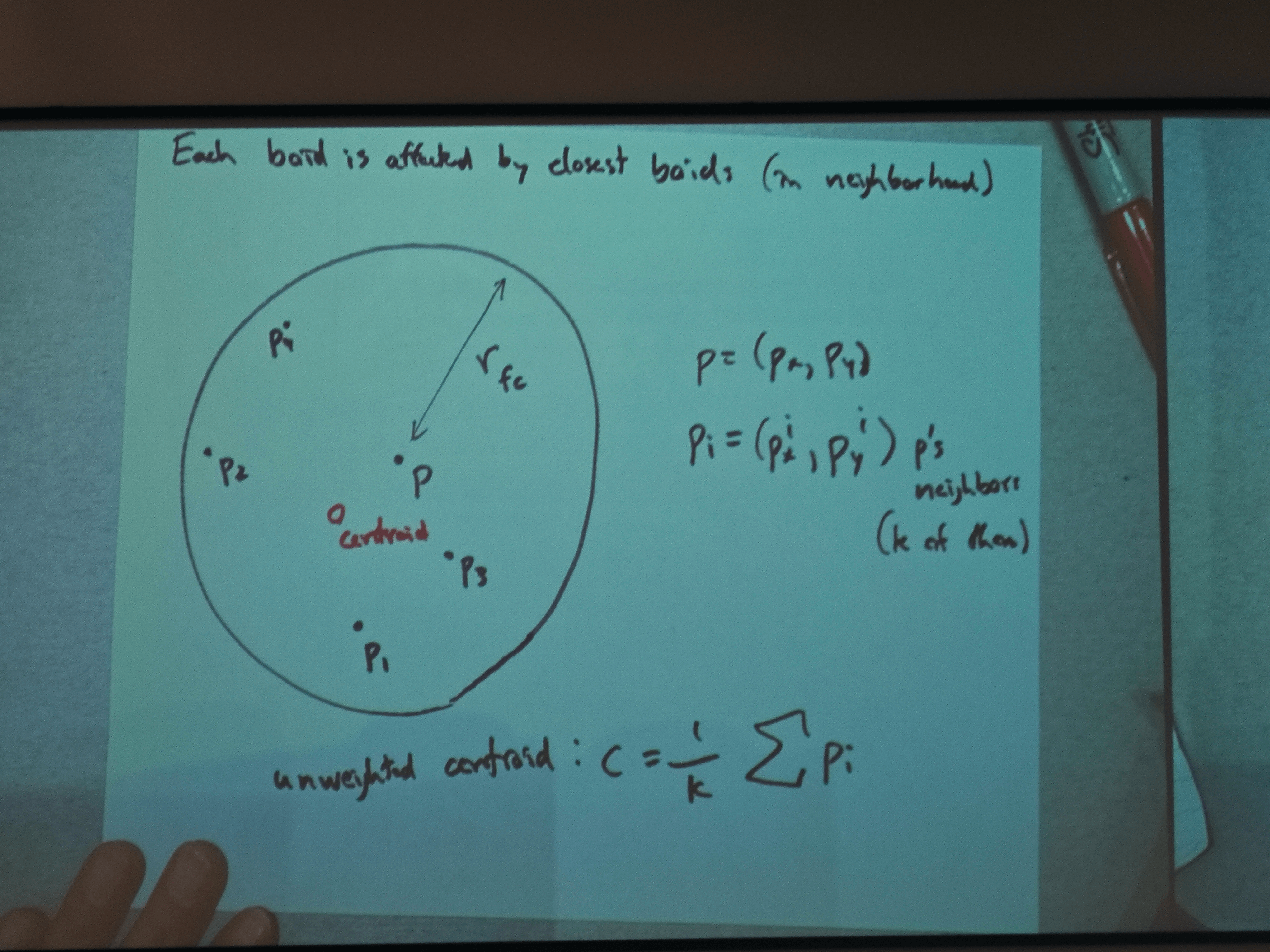
Unweighted centroid: c=
flock centering force
Problem:doesn't take int account p's position
distance between boids i&j
(inverse square)
(linear)
weighted flock centering force
Collision avoidence
repel when close
Velocity matching
Wander
Sum all forces
1111
Triffic Simulation
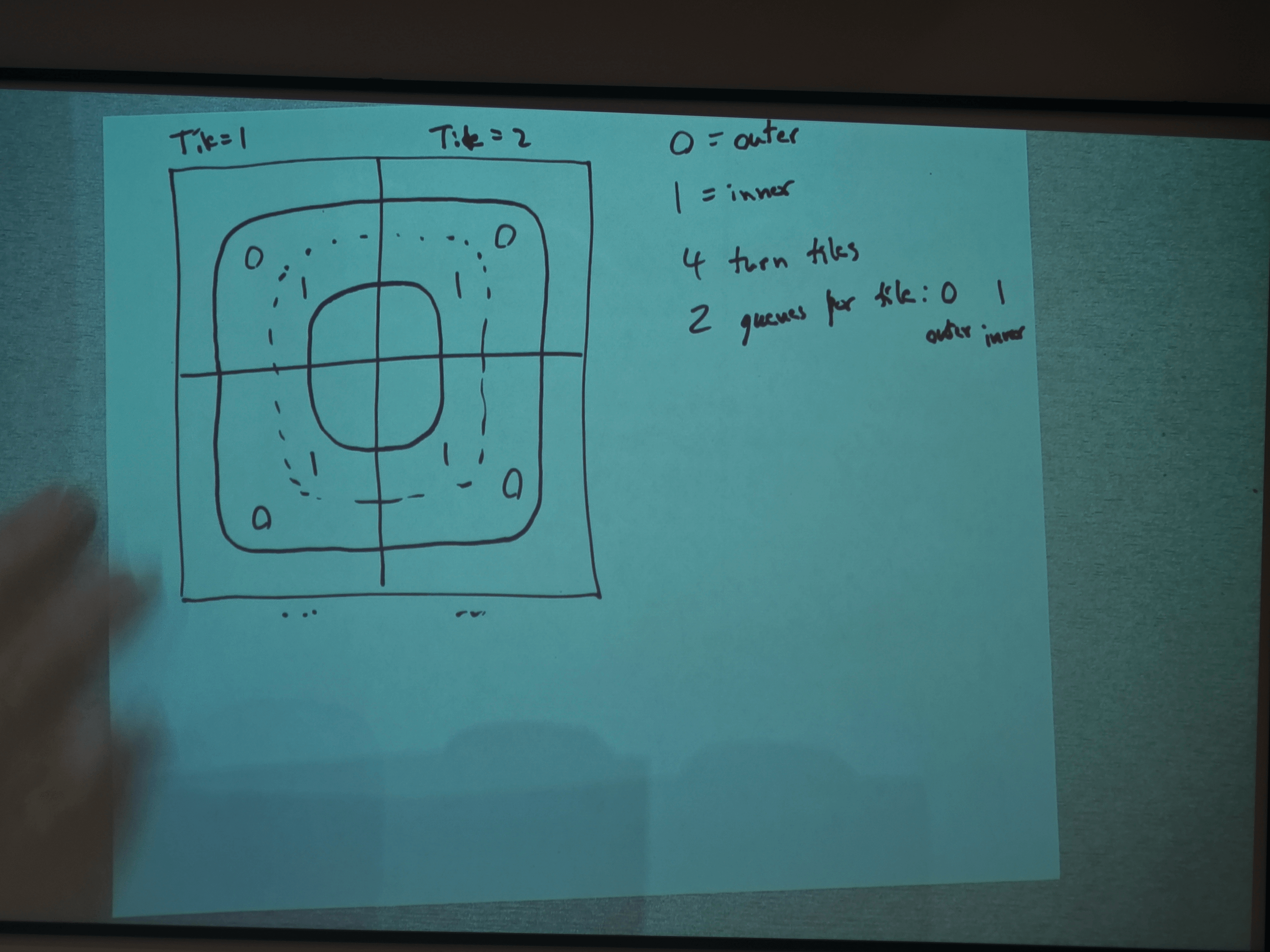
Turnning Tile
Outer Queue: empty
Inner Queue: A
When a car leaves queue of one tile, it enters queue of next tile
- Each car can answer this: What other car is ahead of that one?
- Possible answers
- car one some tile (check the queue)
- car on next tile (check que of next tile)
- ignore cars further than one tile away
0 = outer
1 = inner
4 tunning tile
2 queues for tile:0(outer) 1(inner)
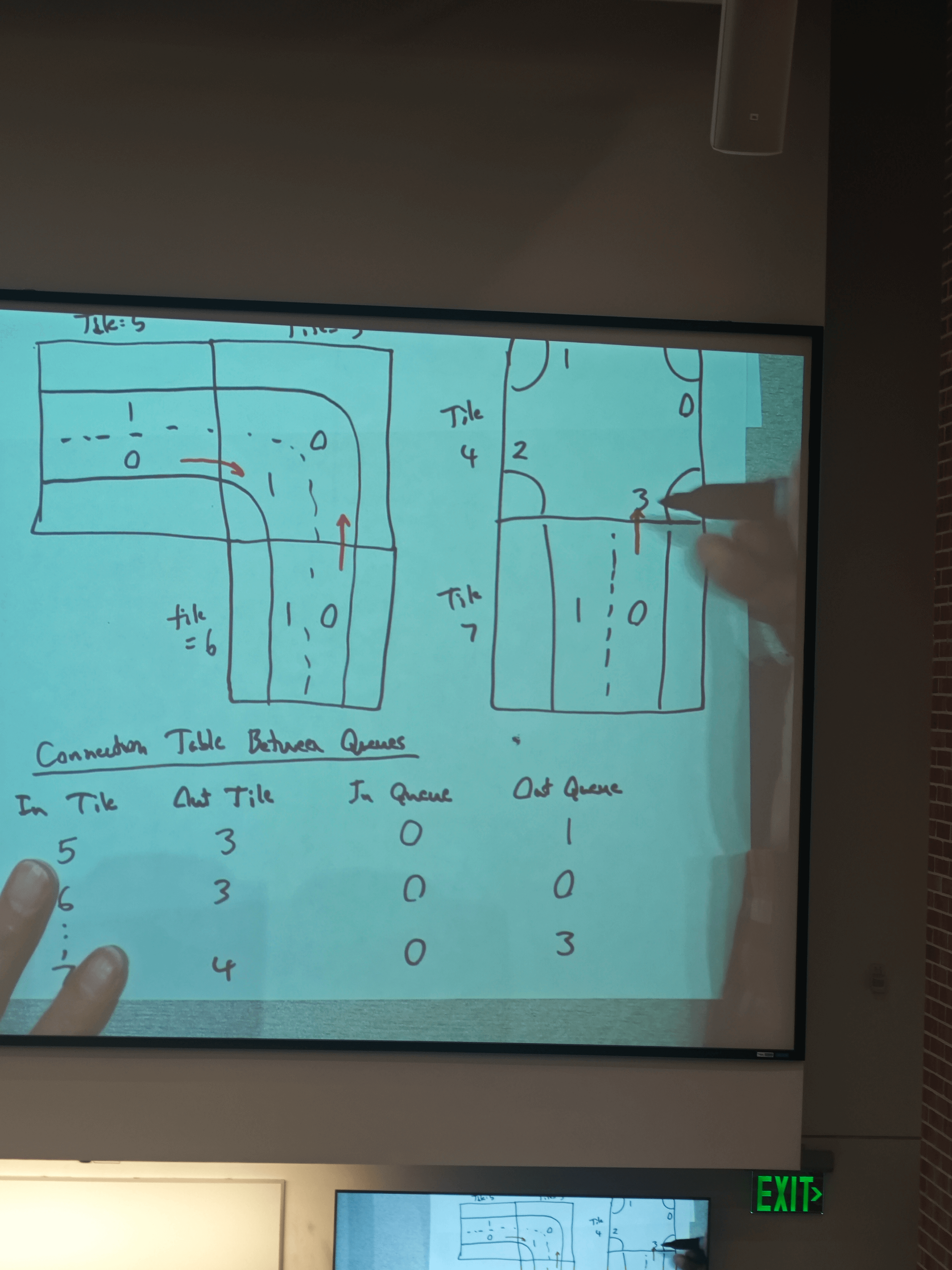
Connection Table Between Queues
| In Tile | Out Tile | In Queue | Out Queue |
|---|---|---|---|
| 5 | 3 | 0 | 1 |
| 6 | 3 | 0 | 0 |
| 7 | 4 | 0 | 3 |
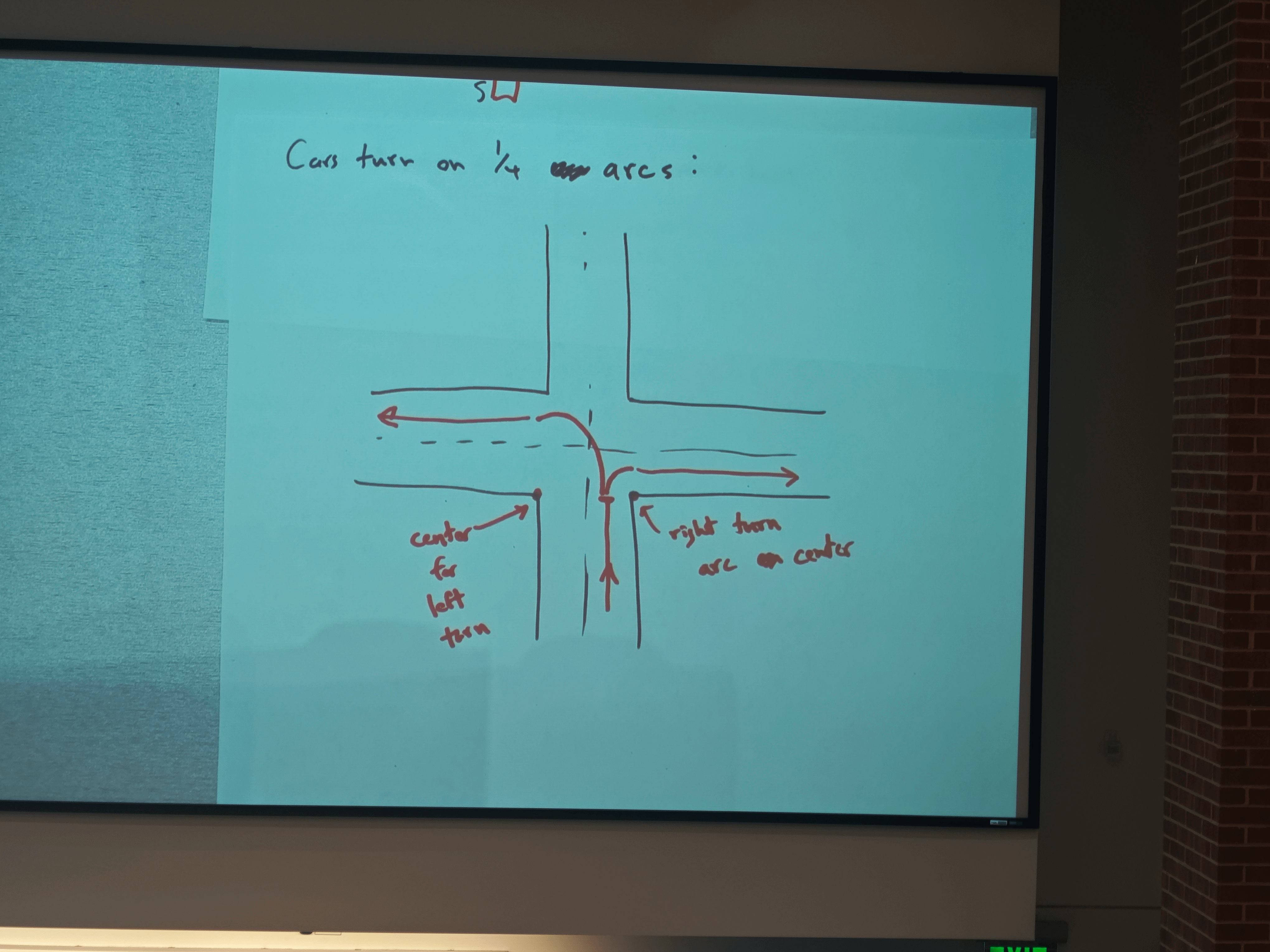
4 - Way Stop
Intersection has 4 car variables: was, west, north, south
N: empty
S: A
E: B
W: empty
Right- of way: first-come, first, serve basis
Can turn on 1/4 arcs
Slow down?
Create imaginary car ahead
Approach Traffic Test
- one car on straight road
- one car on loop
- one car one road with intersection
- Multiple cars on clasped loop
- " " with intersection (3)
Car acceleration
Use Intelligent Driver Model(IDM)
Each car has several parameters
| Symbol | Meaning | Common Values |
|---|---|---|
| desired velocity | ||
| mininum safe distance | ||
| max acceleration | ||
| comfortable deceleration | ||
| T | drivers response time | |
| S | gap to next car |
Each car calculates its current safe distance to next car
New acceleration
Crowds
In animation
- pedestrians on street
- armies on battlefield
- people at outdorr concert
Similar do flocking but diferent
- entirely 2D motion
- characters have goal locations
- may be tightly pecked
- no local alignment with neighbors
- lane formation
Two main Approaches
- agent-based(fast, beahviors more local)
- Potential field/continum-baseed (slower, behavior has more foresight)
A predictive Calltim Avoidence Model for Pestrian Simulation
Karamouzas, 2009
Agent-based
Per-Agent State
- position
- Orientation
- velocity
- radius
forces
- attraction to goal position
- repulsion from obstacles
- avoidance of other agents
Attraction to Goal
is goal position is speed preference is time to reach speed pref is direction to goal unit vector
Avoid Walls
is agents' radius is normal at wall agent's preferred to wall shortest distance to wall steepness of repulsion [1,4]?
Avoid other agents
confortable distanceo to others dist between agents i& j - collision if
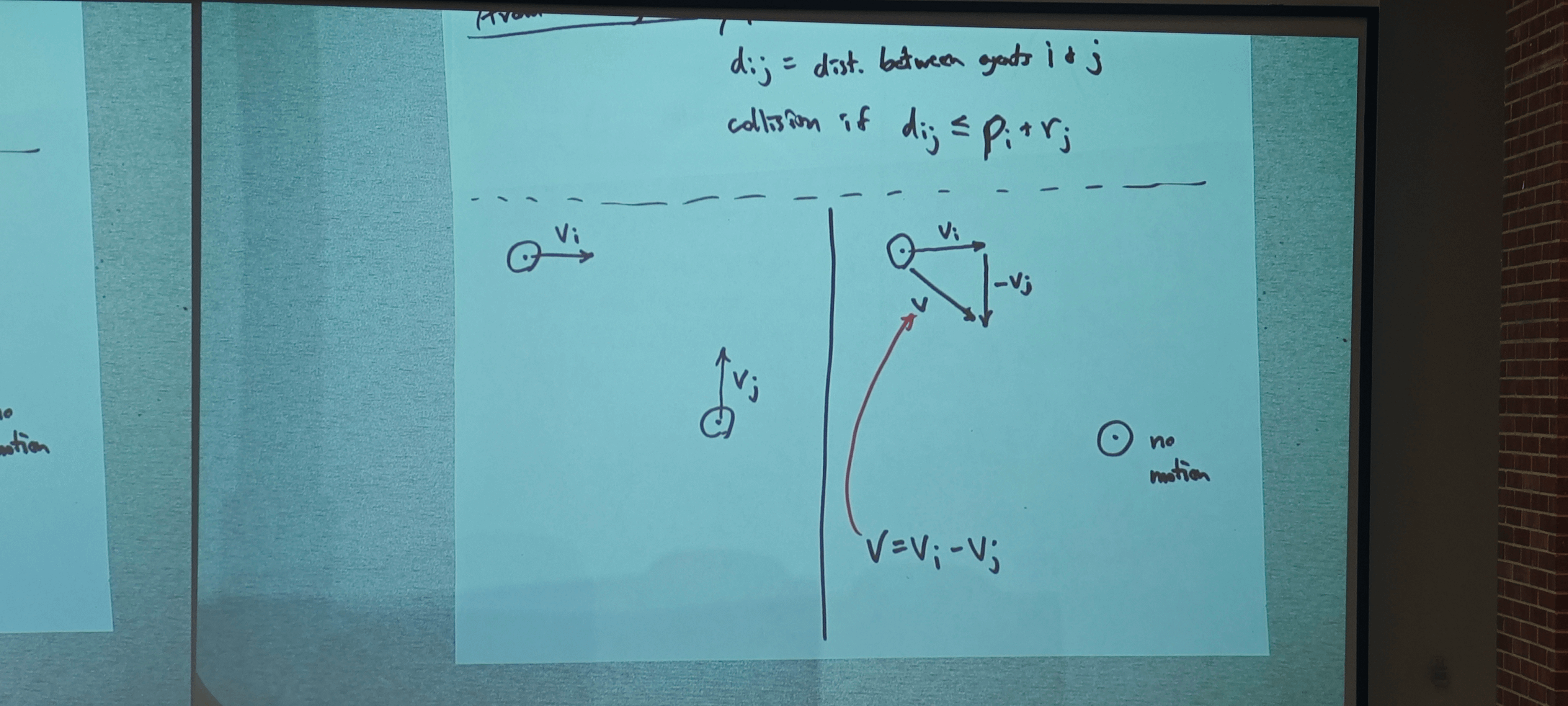
Position of agent i at time t (using v)
Collision will occur if/when
1113
some nearby avoidance forces ->
Continuum Crowds
Treuille et cl, Siggraph 2006
Charastics
- Many characters share same goal (region)
- Speed of agents based on average velocity of crowd
- Speed varies with slope of terrain
Main Idea: Create "potential field" (artificial height) that guides agents with same goals
- character "walking downhill"
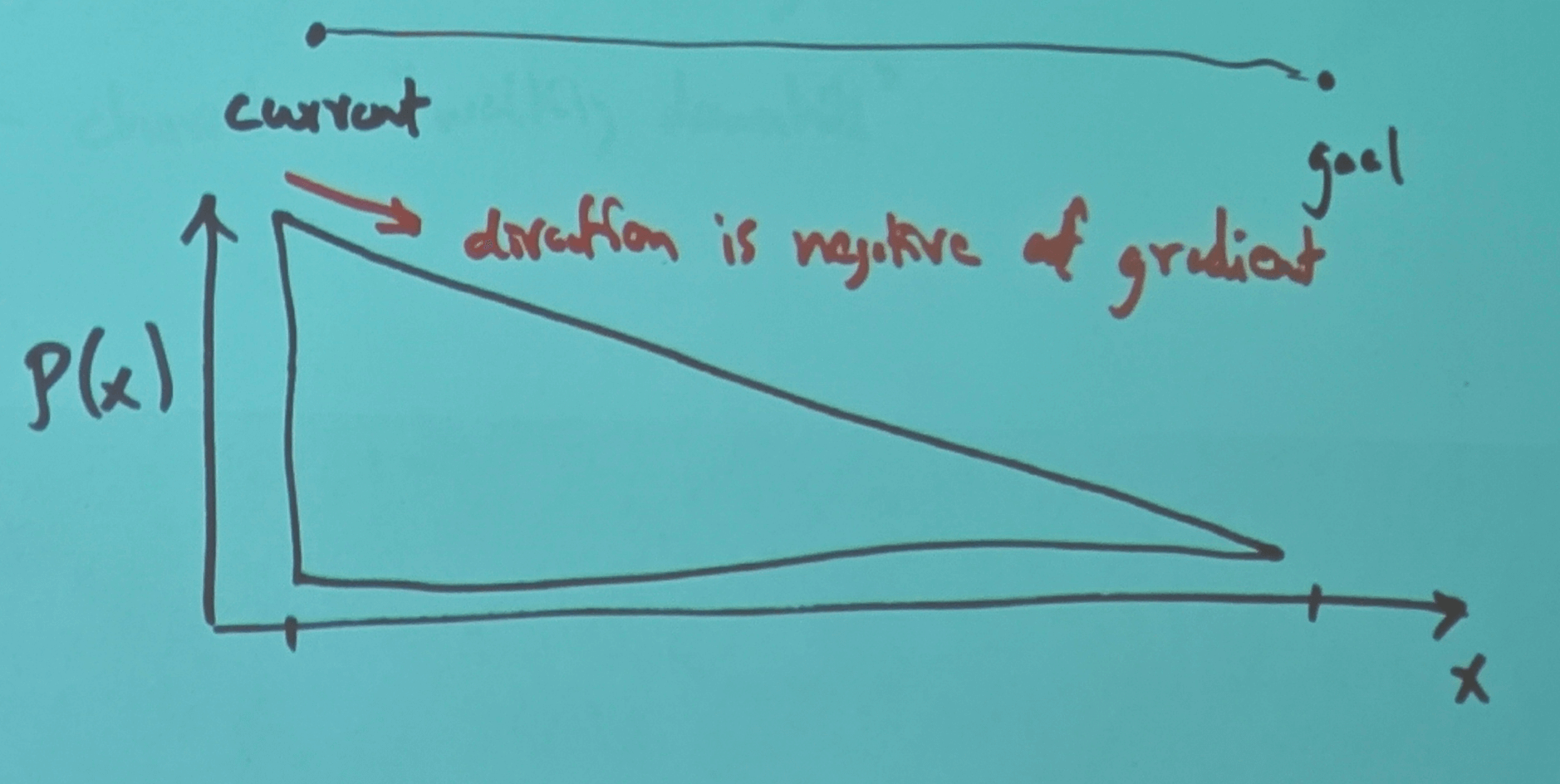
1D example
2D example
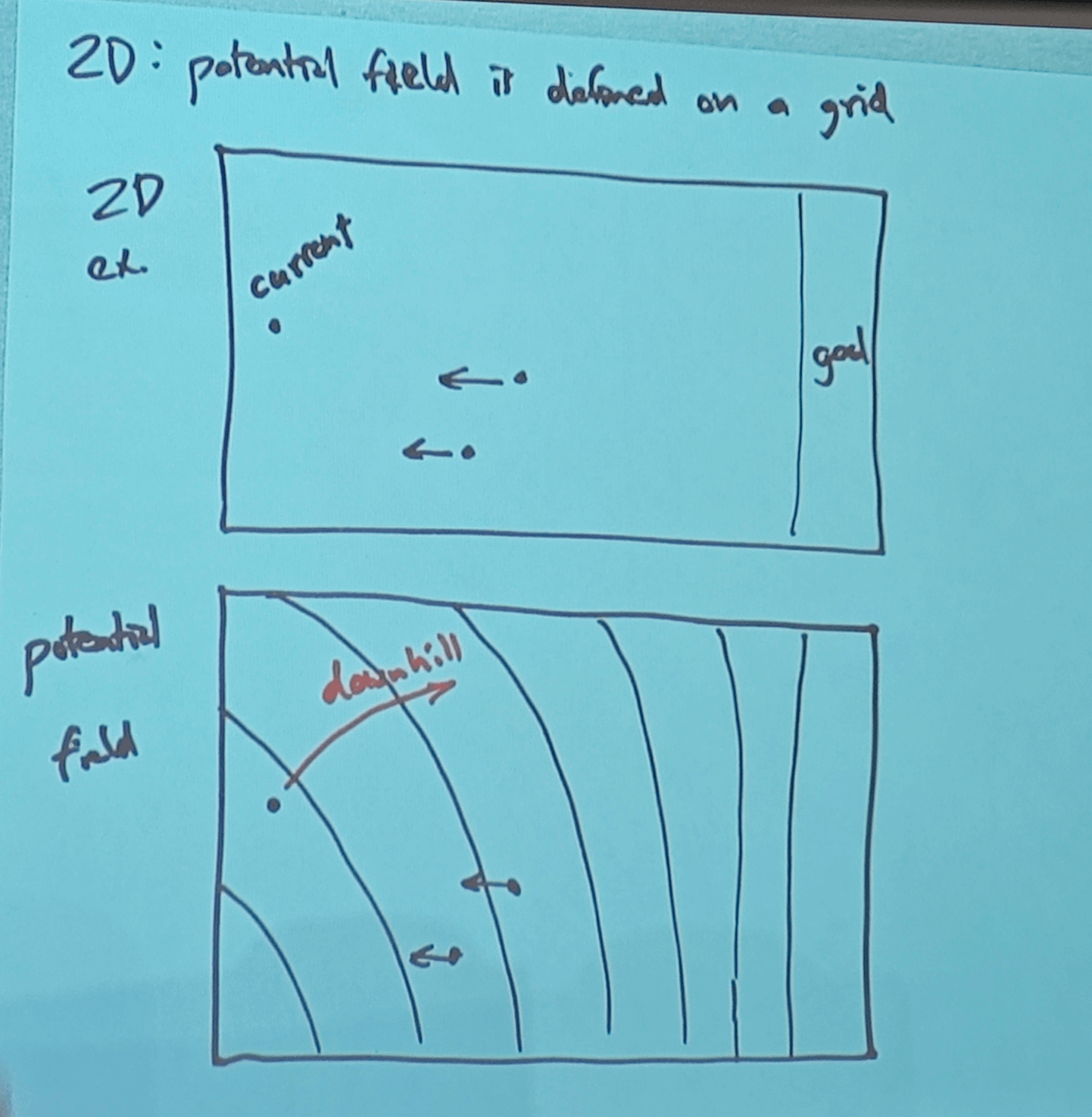
Potential is re-computed many times per second
Used by many agents
Result: lane following
Rouguelike Games
Berlin Elements
- Random dungeon generation
- Permadeath
- Trun-based play(especially fights)
- every action always available(non-modal)
- Multiple ways to solve problems
- Managing resources necessary to survive
- Must fight to survive(hack and slash)
- Items have different properties in different runs
1118
Minecraft: Voxel Worlds & Procedural Terrain
Voxel Representation
Minecraft represents the world using voxels (3D grid of blocks).
Each block:
- fixed size
- integer coordinates
- block type (air, dirt, stone, water, grass…)
- no deformation (not mesh surfaces)
Advantages
- simple data structure
- infinite world (extend grid as needed)
- block-based gameplay (dig, place, build)
- fast updates (modify a small part)
Chunks
To manage huge worlds, Minecraft groups voxels into chunks.
- Typical size: 16×16×256 (x, z, y)
- Allows:
- streaming
- parallel generation
- memory culling
- local updates
Only render chunks near the player.
Procedural Terrain: Noise Functions
Minecraft terrain height at (x, z) comes from Perlin/Simplex noise.
General formula:
1 | height(x,z) = base + noise(x,z)*amp + biome_adjustment |
Multiple Octaves
Use fractal noise:
- mountains
- plains
- hills
- caves (3D noise)
Biomes
Different regions use different noise parameters.
Examples:
- desert → flat, sandy, no trees
- forest → moderate height, trees
- mountains → large amplitude noise
- swamp → low, muddy, water patches
Biome = ruleset for:
- block types
- tree density
- color
- temperature / humidity
- special features (cacti, snow)
Mesh Generation
Minecraft does not render each cube with 6 faces.
Too slow → millions of triangles.
Only render visible faces
If block A touches block B:
- shared face is hidden → skip
So for each block, check 6 neighbors:
1 | if neighbor is air: |
Greedy Meshing
Optimize mesh by merging adjacent faces with same material.
Instead of:
- 100 small quads
Use:
- 1 big quad
Benefits:
- fewer polygons
- fewer draw calls
- faster rendering
Algorithm:
- scan along axes
- detect maximal rectangles of identical visible faces
- emit large quad
Lighting (Block Light + Sky Light)
Minecraft uses light propagation, not per-pixel lighting.
Two components:
1. Sky Light
- propagates downward from the sky
- blocked by opaque blocks
- used for day/night shading
2. Block Light
- torches, glowstone, lava
- propagated in BFS-like manner
- decreases by 1 per block
Stored as integers (0–15).
Caves & Overhangs (3D Noise)
Using 3D noise:
1 | if noise3d(x,y,z) > threshold: |
Multiple layers:
- Large caverns
- Tunnels
- Cliffs / overhangs (not possible with 2D heightmaps)
World Generation Pipeline
- Choose biome
- Compute terrain height using noise
- Fill blocks up to height
- Apply biome decorators:
- trees
- lakes
- ores
- villages
- Generate caves
- Build mesh with greedy meshing
- Add lighting
- Render chunk
Data Storage
Chunks saved as:
- block IDs
- metadata
- compression (NBT format)
Allows incremental loading.
Summary
Minecraft's world is built from:
- voxels stored in chunks
- noise functions for terrain
- biome rules for variety
- greedy meshing to reduce polygons
- light propagation for block lighting
- 3D noise for caves
Efficient, scalable, easy to modify → ideal for procedural generation.
1120
No Man Sky
Almost everything procedurally generated
- terrain
- creatures
- planets
- vehicles
Each planet described by 64-bit seed
- Sean Murray(2017) - noise, terrain
- Innes Mckendrick(2017) - wrold creation (great!)
- Grant Duncan(2015) - art for creatures & plants
Plant Terrain Concepts
- 3D voxel grid for terrain (not hight field)
- voxels only in thin "shell"
- sphere-to-cube projection
- multiple noise technques
- post-noise decorations
Terrain Shaped by Voxels - volume Elements(Cubes)
- Each voxel:
meter of volume - Voxles have material types: grass, rock, sand, etc
- Stored in
voxel chunks, represent overlap no cracks
Each voxel
- density (2 bytes)
- material type (2)
- material blend (2)
Use dual contouring to make polys(polygons)
Terrain Shell
- Voxels in layer that is 128 meters thick (4 chunks)
- Rides on top of low-frequency noise layer (height field)
- Height can vary by 1km
- High mountains, deep oceans
Sphere to Cube
Voxels placed on a curved sphere in game
For storage, indexed on grid(cube)
Deorations
rocks
rock worms
caves
pilers(enery source)
plants
Multiple Noise Methods
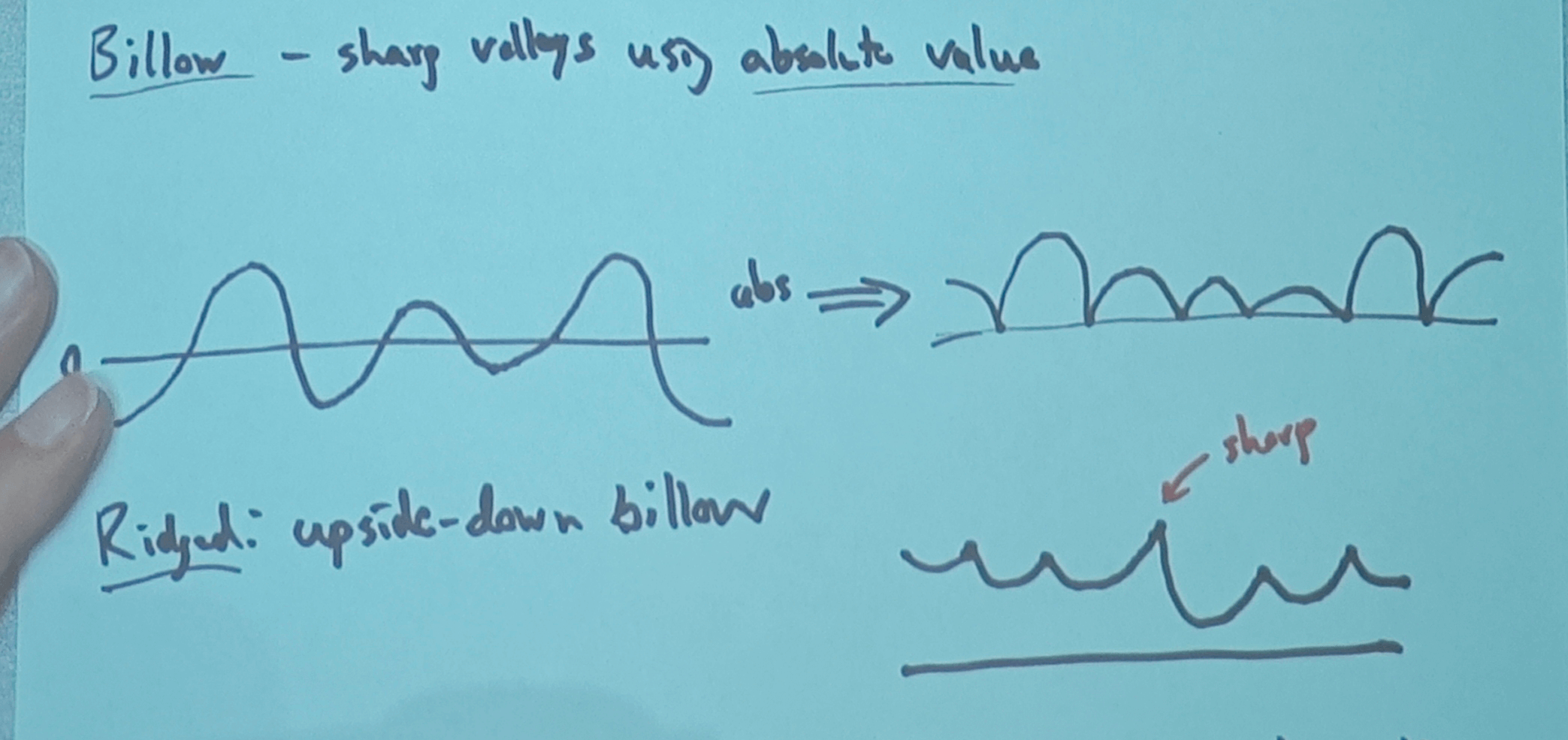
sum of perlin octaves(fractal noise, fractal Brownian motion, octave noise)
Billow - sharp valleys using absolute value
Ridged: upside-down billow
Domain warping (like Minecraft): add noise to input position
Attribute Cascade
Galaxy - Emty/Harsh/lush/Normal
Star System Spectal Class: Yellow/ Red/ Green (not real)/ Blue
Planets
Terrain/Biomes largely independent Terrains: Ocean Worlds -Continent, Pangea - Swamp -Riverland
Plants& Animals
Animals
Locomotion vareidy: walk,fly, swim, ...
usual graphics component:
- mesh
- rig(skleton)
- textures
artist creates base model
- Skeleton (rig)
- mesh geometry (z- brush or simulator)
- bone scaling system -> changes the rig
animation rig shared across animals:
- cows
- horses
- antelope
swim: same rig
- dolphin
- shark
- whale
decorations: Fins, tail, dorsel crest, spikes, etc
large techure library - cretve skins
Plants
trunks shared between trees
different branches added
Leaves & materials
bone scaling for different shapes(bend...)
library at bark & textures
1125&1202
Generative AI
What is Generative AI?
A model that produces new data resembling the data it was trained on.
Generates:
- text
- images
- 3D shapes
- audio / music
- code
- terrain / textures (PCG!)
Instead of predicting labels (discriminative), it generates samples (generative).
Discriminative vs Generative
Discriminative
Learns the boundary:
Examples:
- classifier
- segmentation model
- logistic regression
- ResNet for ImageNet
Generative
Learns the distribution of data:
Examples:
- GPT (next-token prediction)
- Diffusion models
- GANs
- VAEs
Large Language Models (LLMs)
LLMs are trained using next-token prediction:
Transformer architecture
Key components:
- self-attention
- multi-head attention
- positional encoding
- feed-forward layers
Properties:
- learns long-range dependencies
- massive scalability
- parallelizable (unlike RNNs)
Diffusion Models
Modern SOTA for image generation.
Forward process
Add noise gradually:
1 | x₀ → x₁ → … → x_T (pure noise) |
Reverse process
Learn to denoise:
1 | x_T → x_{T-1} → … → x_0 |
The model predicts either:
- the denoised image
- the noise itself
- velocity / score function
Why Diffusion Works Well
- stable training
- excellent mode coverage (no mode collapse like GANs)
- conditioning is easy (text, masks, depth)
- supports image editing (inpainting, outpainting)
Latent diffusion (Stable Diffusion):
- compress image into latent space
- run diffusion in latent → faster, cheaper
GANs (Generative Adversarial Networks)
Two networks:
- Generator G: produces fake samples
- Discriminator D: distinguishes real vs fake
Train in a minimax game:
- sharp images
- fast inference
Cons:
- unstable training
- mode collapse
VAEs (Variational Autoencoders)
Encode → latent → decode.
Latent is sampled from Gaussian distribution.
Objective:
- structured latent space (good for interpolation)
- stable training Cons:
- blurry images
Generative AI in Games (PCG)
Used for:
- terrain generation
- textures (style transfer, diffusion)
- creature/weapon/item variation
- dialogue / quest generation (LLMs)
- animation synthesis
- NPC behavior
- procedural sound generation
Why generative models help PCG
- infinite variety
- controlled randomness
- artist-guided generation
- faster content pipeline
Prompting & Conditioning
Models can be guided by:
- text prompts
- images
- sketches
- depth maps
- segmentation masks
- engine metadata (for game content)
Control techniques:
- classifier-free guidance
- ControlNet
- LoRA (lightweight fine-tuning)
- inpainting masks
Risks & Limitations
- hallucination
- copyright concerns
- bias in training data
- safety alignment
- compute cost
- unpredictable outputs
But rapidly improving with:
- RLHF / RLAIF
- synthetic data refinement
- guardrail models
Summary
Generative AI includes:
- LLMs for language
- Diffusion models for images
- GANs / VAEs for latent modeling
- Transformers everywhere
And is heavily used in:
- PCG
- game asset creation
- animation
- world generation